Couples
Couple statique
Quand je parle de couple statique, cela signifie que le moteur est alimenté mais qu'il n'y a pas de commutation des phases. Quand les pôles opposés du rotor et du stator sont parfaitement en face, le couple est nul et l'état est stable: si on écartait le rotor de sa position, un couple le ferait revenir. Si on se décale de 4 pas, on se retrouve exactement dans la même situation. Si on se décale de 2 pas, les pôles identiques au rotor et au stator sont en face, et le couple est de nouveau nul. Mais l'état est instable, un petit écart angulaire, va faire apparaître un couple qui va accentuer l'écart. Entre ces points, la forme du couple est complexe, mais on peut considérer en première approximation que le couple est une fonction sinusoïdale de l'angle.
Si le moteur était parfaitement à vide (pas ce couple, pas de frottements), en position statique, le moteur ne délivrerait aucun couple (on est pile poil sur le pas demandé). En charge, plus on demande ce couple, plus le moteur va se décaler. Si le rotor est en retard, le couple est positif et tendrait à faire avancer le moteur pour rattraper cet écart. Si au contraire on dépasse la position indiquée par le phase, le couple est négatif et le rotor aura tendance à revenir en arrière. Tant que l'on ne dépasse pas le couple maximum, on se trouve sur la courbe rouge en gras, et la position du rotor est définie à 1 pas près. On n'est pas sur le pas sélectionné, il y a donc une erreur de positionnement de +/- 1 pas. En mode micro-pas, il y aura quand même une erreur pouvant aller jusqu'à 1 pas (et non pas 1 micro-pas). Et moins le moteur est chargé (plus le couple demandé est faible) plus il est juste.
Si le moteur est utilisé avec un couple constant qui est toujours dans la même direction, tous les pas sont décalés de la même quantité, mais dans le cas d'une commande numérique où l'on va entraîner un chariot d'un côté ou de l'autre, il y aura un décalage dans un sens pour l'aller et le décalage sera dans l'autre sens pour le retour. On peut donc avoir un hystérésis allant jusqu'à 2 pas.
Si on force et que l'on décale le moteur entre 1 et 2 pas, il aura quand même tendance à revenir à 0, mais en général la courbe du couple qui a fait ce décalage ne permet pas de revenir (c'est le cas si on tourne à la main). On va alors accrocher la position 4 pas plus loin si le couple a diminué suffisamment, sinon on va décrocher de 4 pas en 4 pas.
Tout ceci veut aussi dire qu'un moteur pas à pas ne peut pas perdre un pas unique, mais qu'il les perd éventuellement par paquets de 4. Ainsi on peut perdre 4 pas, 8 pas... Quand on est en butée, et que l'on continue d'envoyer des ordres de pas, tous les 4 pas, le moteur va revenir sur une position stable en arrière et il va y avoir un "saut" de 3 pas (en mode pas) à presque 4 pas (en mode micro-pas). Ce saut étant important cela va procurer du bruit, mais ce n'est absolument pas dangereux pour le moteur lui même. Les vibrations peuvent endommager à la rigueur la mécanique, mais le moteur ne va pas surchauffer comme le ferait un moteur à courant continu.
Si le moteur ou sa charge a du frottement, c'est autant de couple en moins disponible, par exemple pour vaincre l'inertie. La courbe du couple va ressembler à:
Il n'y aura plus un seul point stable mais un segment. Le moteur peut s'arrêter en fait n'importe où, pas forcément du côté du déplacement car il peut y avoir des inerties et des dépassements. On voit aussi apparaître un segment stable là ou il y avait un point instable. Mais à priori, sauf à la mise sous tension, on ne sera pas sur ces segments.
Dans un moteur, le couple moteur est égal au couple résistant. On ne devrait pas confondre le couple du moteur réel avec le couple maximal qu'il est capable de fournir. Dans la pratique, quand on parle de couple, il s'agit du couple maximum que le moteur peut fournir.
Dans un moteur à courant continu, le couple qu'il fournit est proportionnel au courant. Plus on charge le moteur CC, plus le courant absorbé augmente. Un moteur CC à vide ne voit donc pas passer ce courant. Pour un pas à pas, c'est complètement différent. Le courant à l'arrêt est important (et il diminue avec la vitesse. Il ne va pas dépendre de la charge, il va surtout diminuer avec la vitesse de rotation. Le couple moteur et le courant ne sont pas liés. Le couple maximum que le moteur peut fournir est par contre proportionnel au courant. Dans la pratique, on met un certain courant en espérant que cela suffise.
Couple résiduel
Lorsque le moteur n'est pas alimenté, la présence d'un aimant permanent et de pôles va permettre au moteur d'avoir un couple maximal non nul. Ce couple est faible, par exemple 20 fois moins que le couple statique. Les moteurs sans aimant permanent n'ont donc pas de couple résiduel.
Couple dynamique
Le couple (maximal) est sensiblement proportionnel au courant qui traverse le ou les enroulements. Le moteur, comme nous l'avons vu
présente un couple à l'arrêt, du fait du courant qui le traverse. Lorsque le moteur tourne, ce couple utile va diminuer pour plusieurs
raisons:
- présence d'une inductance qui ralenti les variations de courant
- présence d'une force contre électromotrice
- augmentation des frottements du moteurs diminuant d'autant le couple utile;
Si on commande le moteur en tension, plus on va vite, plus l'effet de l'inductance va ralentir l'établissement du courant et donc le couple. Si le moteur est alimenté en courant, le couple diminuera moins vite avec la vitesse. La source de courant n'est pas complètement idéale, on utilise une source de tension que l'on découpe pour obtenir le courant souhaité. Plus la tension d'alimentation est élevée, plus vite on arrive au courant souhaité, et donc plus le moteur va conserver son couple si la vitesse augmente. Concernant la force contre électromotrice, plus la tension d'alimentation est élevée, moins son effet se fera sentir. Pour la courbe du couple en fonction de la vitesse, le constructeur va donc donner la tension d'alimentation du driver.
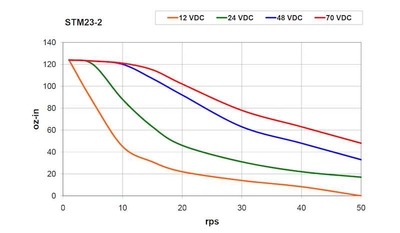
Un des moteur STM23-2 est un moteur 2,8A 0,9Ω soit 2,5V. Sur la courbe le constructeur ne propose même pas une alimentation en 2,5V et suppose que le moteur est alimenté avec 12V minimum. On voit sur les courbe très nettement le gain procuré par une tension d'alimentation élevée. On a pour la moitié du couple statique une vitesse maximale presque proportionnelle à la tension d'alimentation.